
@不是郑小康:特斯拉昨天秀了一下 Optimus 机器人的第三代手掌,这个部件比看起来要更重要,这条微博简单说一说。iOS链接
首先要明确这个接球是遥控实现的,也就是有工程师戴着 VR 设备,VR 界面是这个机器人前向摄像头感知的画面,摄像头看到网球丢过来,工程师通过 VR 的手柄操作机器人的手掌把球接住。
显然,特斯拉实现了非常低的遥控延迟,但这个指标不是重点,重点是视频中机器人手掌像人手一样灵活的自由度和运动精度。
今年 5 月的时候,Elon Musk 第一次对外公开 Optimus 第三代手掌将会有 22 个自由度,并将执行器移动到手臂上。
他在 Lex Fridamn 的播客上展开谈论了手掌:
「从机电的角度,手臂占据了 Optimus 机器人所有工程量的一半。
Optimus 第二代手掌尝试把执行器——相当于人的肌肉——放在手掌上,然后你就会有一个看起来非常奇怪的巨手,而且实际上这种手的自由度和握力都不行。
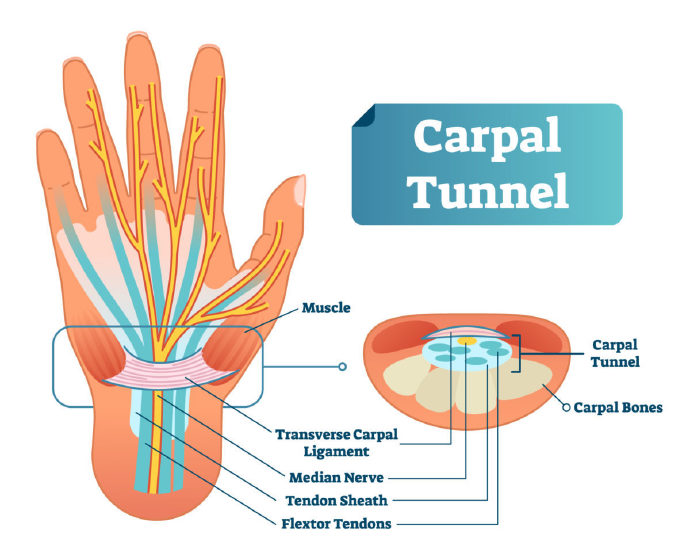
你必须重新审视你的手然后思考 Ta 是怎么工作的,如果你看人的手,大量的肌肉其实是在手臂上,手掌上确实有一些小的肌肉,但是是你的手臂在真正控制你的手指实现很多操作,手掌就像一个傀儡。手臂的肌肉穿过 Carpal tunnel 牵引控制手指。
所以你就意识到,OK,必须重新设计手掌,把执行器放到手臂上,就像人一样。
还有一个原因是手指长度,从进化的角度来说,5 个手指一样长也不会多耗费多少能量,一样长是 OK 的。
但为什么不一样长?因为长短不一的手指大大加强了手的灵活性。比如你的小手指,为什么不能再长一些?小手指可以显著提高你精细操作的能力。
如果你不小心失去了你的小手指,你手的灵活性会明显下降。」
基于上述原因设计出的第三代手掌的挑战是…极致的仿生意味着极致的复杂,其实特斯拉是重新设计了肘部往前的一整个前臂,其中的传感器、执行器都是从零开始设计的。
我们看视频可以发现,除了灵活性,Optimus 第三代手掌的手指长短不一,是高度拟合人手的。另外集成了大量执行器的左臂,也没有粗得离谱,说明他们的工程集成度做得很好,电机功率密度也比较高。
这样的话,Optimus 机器人就可以谈钢琴,甚至是谈吉他了。可以尝试挑战人手可以执行的绝大多数操作了,虽然目前还只是理论上的可能性。
除了手指外,根据特斯拉 Optimus VP Milan Kovac 的说法,手腕/前臂也有 3 个自由度。接下来特斯拉的工作包括集成触觉感应,通过手臂进行非常精细的控制,尝试给前臂减重(集成了大量执行器,重了很多)。
跳出这些工程细节来看,其实这个第三代手掌是对「人形机器人」这个路径的进一步强化,每次分享机器人要不要做成人形,两派总能吵成一团,把手掌做得像人手一样灵活,就是把人形机器人这一路径上机器的通用性做到极致。
特斯拉的目标是 2025 年年底把 Optimus 迭代到可用的状态,实现限量的生产,在 2026 年实现大批量量产。
 微信扫一扫打赏
微信扫一扫打赏 支付宝扫一扫打赏
支付宝扫一扫打赏





