

华为 “ 天才少年 ” 、 B 站科技类百万粉丝 up 主…
相信大伙儿对顶着这些头衔的稚晖君,肯定不陌生吧?
当年以天才少年计划最顶格的 201 万年薪加入华为之后,稚晖君这三个字就仿佛自带了光环效果。
不过去年年底,稚晖君却突然从华为离职,要自己下海创业去做机器人。
曾经华为 “ 天才少年 ” 的身份,再加上机器人的风口,一时间还引发了不小的讨论。
光是这半年多的时间,稚晖君的智元机器人就已经拿到了百度、经纬创投等明星创投机构的钱,十几亿美元的市场估值更是高得吓人。
一个机器人项目能拿这么多钱,作为吃瓜群众的我们自然也十分期待,稚晖君的机器人到底能做成什么样。
只不过,除了能在稚晖君的 B 站和微博上找到一些项目的蛛丝马迹之外,他们团队似乎都不咋高调。
而等了半年多,今天,稚晖君可算是带着他的人形机器人来了。
好消息是,差评君也去到了发布会现场,给咱带回来了一手的消息。
从发布会现场的成品来看,这次的主角 “ 远征 A1” 智元具身智能机器人,的确挺赛博的。
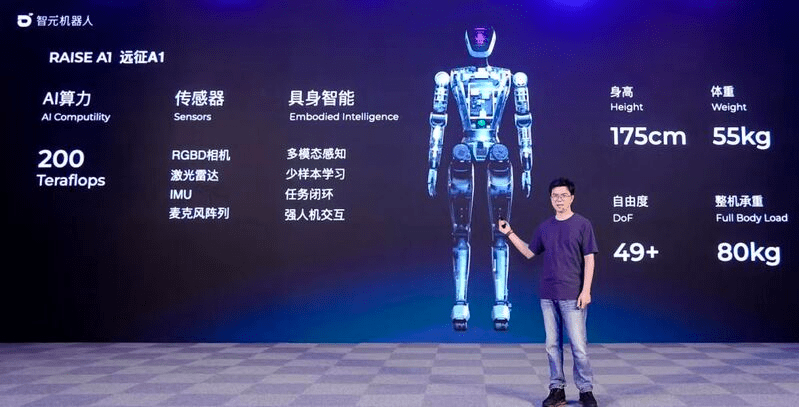
175cm 的身高、 55kg 的体重,承重 80kg ,单臂最大负载 5kg ,这放在现实里,高低也是个帅小伙儿。
整体造型上,跟去年马斯克的擎天柱、小米的 “ 铁大 ” 差不太多。
按照咱平时上下班的走路速度,一个小时能走 5km ,远征 A1 的走路速度 7km/h 跟人类其实也差不多。
而在关节的设计上,远征 A1 也朝着更像人的方向努力。
在机器人的关节自由度上,一般来说,关节自由度越高,机器人也就越灵活。
像我们人类的关节正常来说是 200 多个,这次远征 A1 的关节自由度虽然只有 49+ ,但团队想了个 ” 反关节设计 “ 的法子。
也就是,把膝盖那个地方往后折。
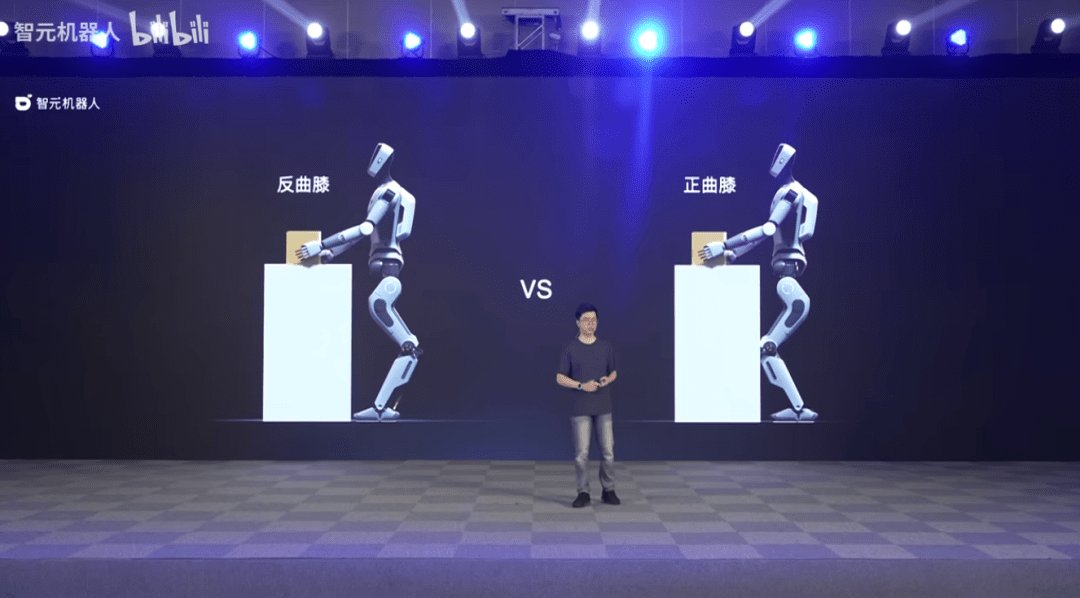
这对于人类来说当然是不可能的,但恰恰是这种反关节的设计,能够让远征 A1 有更多灵活运动的空间,能干的活儿自然也就更多了。
而且,为了提高远征 AI 的通用性,他们团队还在机器人上做了模块化设计。
两条腿可以拆了,换成轮式的,手也可以卸下来,换成电钻,或者螺丝刀。
我算是看出来了,稚晖君和他的团队真的很努力在想怎么才能让远征 A1 干更多的活儿。
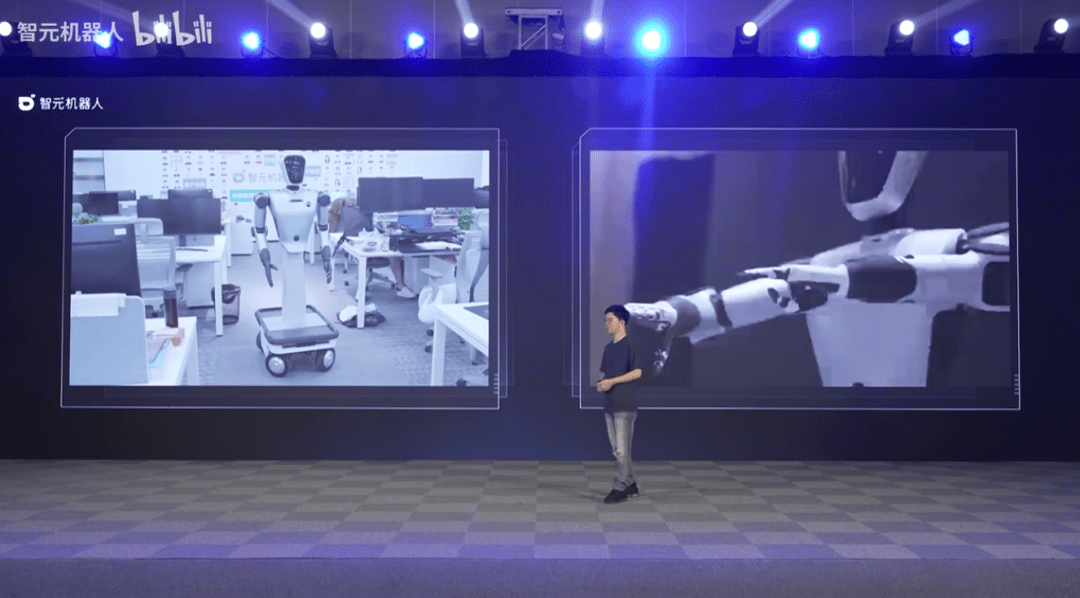
根据官方展示的视频,远征 A1 能够在工厂、生化实验室还有家庭三个场景里实现应用。
像汽车产线里的底盘装配、外观检测这些高重复性又枯燥的工作,视频里的远征 AI 做得稳稳当当。就连电子厂里组装装配、物料搬运的活儿也给包了。
或许以后像拧螺丝、零件组装这些简单的活儿都能让人形机器人来干了。
而且,远征 A1 看起来也是个搞科研的一把好手,生化实验室里的样本制备和样本扩增也能让它来。
在家里就更夸张了,远征 A1 上能辅导孩子做功课,下能在厨房打鸡蛋。
至少目前从视频展示来看,远征 A1 没啥毛病,不过遗憾的是,这些能力只出现在视频里,没能在现场亲眼看到。
唠了这么久,相信大伙儿也好奇了,这远征 A1 到底是怎么做到这些的呢?
其实吧,无论是哪家做人形机器人,都绕不过两个问题:一是怎么才能让人形机器人跟人类一样动作灵活,二是怎么才能跟人类一样聪明。
在第一个问题上,除了波士顿动力的 Altas ,其他家的人形机器人多多少少都免不了被吐槽走起路来像个 “ 脑瘫 ” 。

因为关节电机这事儿就不好解决。
毕竟,机器人要想灵活,不仅要求关节电机的数量尽可能多,而且体积得小、重量得轻,对扭矩也有要求。
针对电机关节的问题,智元这次给出的解决方案是自研的 PowerFlow 关节电机。
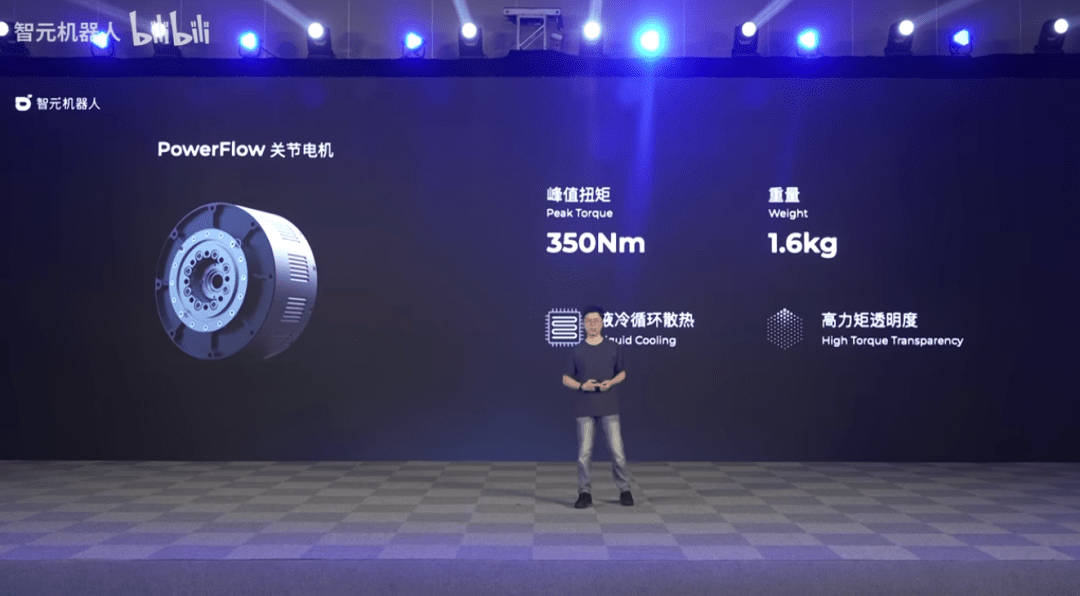
根据官方的数据,关节电机的峰值扭矩可以达到 350Nm ,重量也只有 1.6kg 。
而且,为了让远征 A1 能够保持高功率的输出,电机中还加入了液冷散热结构。
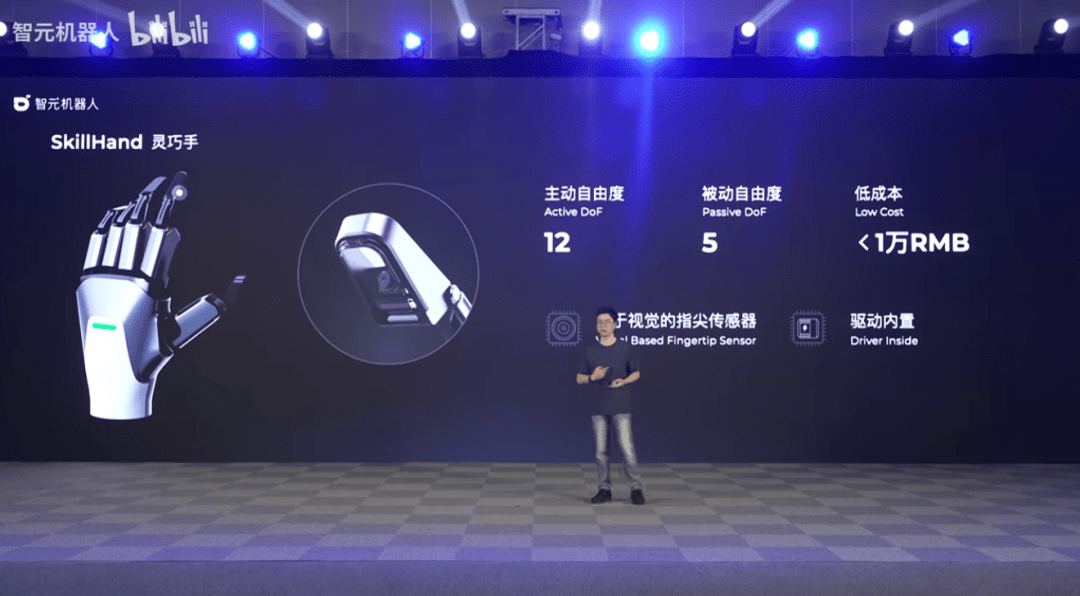
另外,智元这次自研的还有个灵巧手 SkillHand 。
12 个主动自由度、 5 个被动自由度,让远征 A1 干起活儿来灵活了不少。
当然了,光有硬件还不够,机器人要动起来少不了运动控制算法的加持。
这运动控制算法的主要工作,就是协调关节电机,完成指定任务。
打个比方,机器人要从桌子上拿苹果,那用什么样的姿势、用什么样的速度去拿,都需要运动控制算法发挥作用。
根据稚晖君在发布会上的说法,远征 A1 的运动控制算法已经迭代了三个版本,从最初的 IQP ,到 CMPC 、线性 NMPC ,再到非线性的 NMPC 。
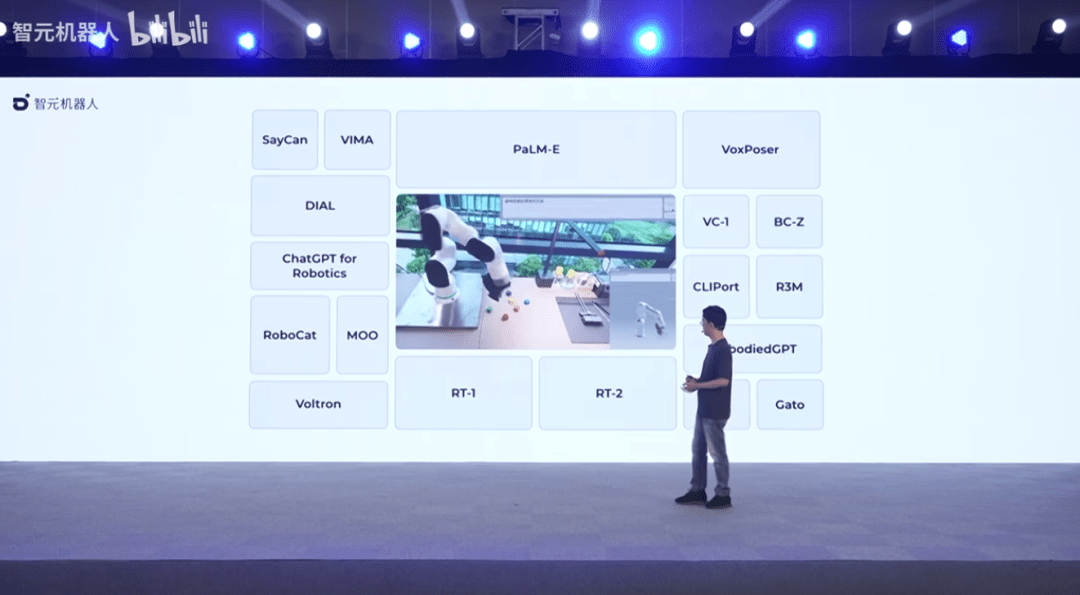
而针对第二个如何让人形机器人变得更聪明的问题,这次发布会也有个重头戏,那就是对具身智能的介绍。
具身智能,你可以理解成聪明的 AI ,有了实体化。
像这次的远征 A1 ,有了个名叫 EI-Brain 的具身智脑框架。
这个框架主要包括云端超脑、大脑、小脑以及脑干,分别对应着任务级、技能级、指令级和伺服级四个层级。
像小脑就负责运动控制指令的生成,大脑就需要具备理解、推理的能力。
而且,为了让机器人在完成任务的过程中能够更像个人 ,智元还在远征 A1 里加入了一个 WorkGPT 大模型。
大模型的厉害想必大家伙儿也已经见识过了,在稚晖君看来,语言和图像大模型主要有两方面的价值。
其一,是庞大的先验知识库和强大的通识理解能力。
比如说,你想让远征 A1 拿走桌子上的垃圾,但你完全不需要告诉机器人哪些是垃圾,因为它能够自己分辨出来。
其二,就是复杂的语义多级推理能力。
咱们再打个比方,在一堆积木里,如果指令是把蓝色积木放在红色积木上面,那执行起来是很简单的。
但如果是把蓝色放在红色下面,机器人就需要考虑积木不能浮在空中,那怎么完成任务?
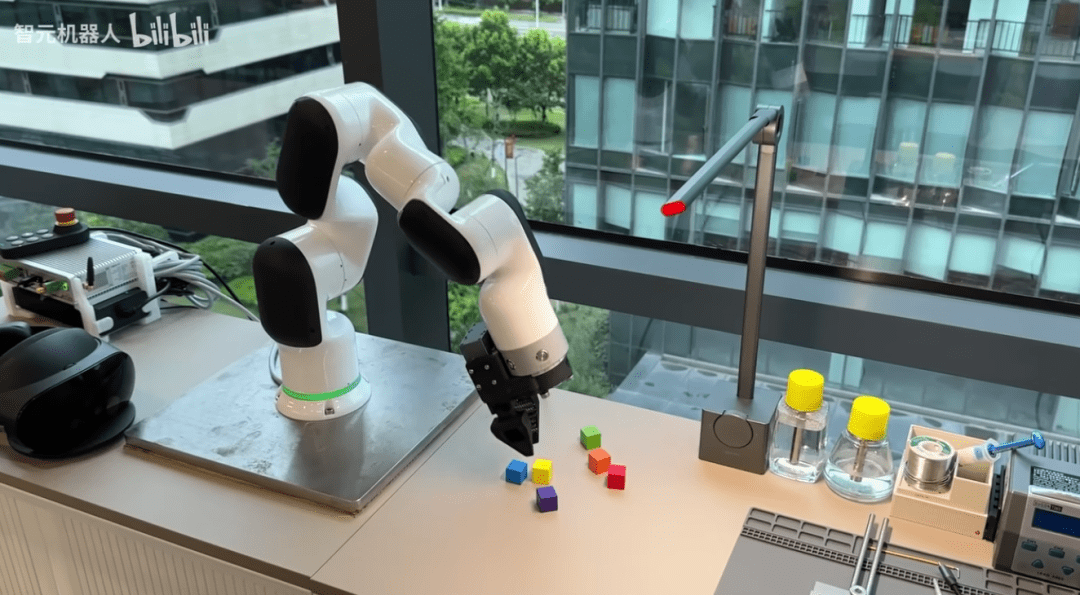
如果放在以前,可能需要单独设定一个程序,一步步告诉机器人,先把蓝色积木放在别的颜色上面,再放上红色积木。
但大模型不需要提前设定,它自己就知道需要考虑重力的条件。
一句话总结,那就是大模型的加入让远征 A1 懂推理了。
其实吧,要是放在去年,大家都还不怎么爱提具身智能这个概念。
但自打这大模型成熟以后,具身智能就也跟着火了起来。
科技公司们变着法子想把自家的硬件变成具身智能,包括这几天的世界机器人大会上,人形机器人的数量都比去年多了不少。
可以预见的,接下来人形机器人 + 大模型的组合,应该会成为主流趋势。
不过,人形机器人作为机器人界的圣杯,也不是那么容易能攻下来的,光是让人形机器人怎么走好路这一条,就已经难倒很多人了。

差评君也跟稚晖君聊了聊,他告诉差评君,目前人形机器人在研发上,还存在缺少姿态数据和视觉数据的难点。
特别是姿态数据,目前可以用来训练的资源并不算多。
这两种数据,影响着人形机器人该以什么样的姿势执行指令,以及对于物品的识别准确度。
不过,这次的远征 A1 只花了半年的时间,能够做到这种程度已经实属不容易。
而在未来,稚晖君还希望把机器人的成本打到 20 万以内。
说不定到时候,咱就能买个机器人溜火锅了。
来源:差评
 微信扫一扫打赏
微信扫一扫打赏 支付宝扫一扫打赏
支付宝扫一扫打赏





